


MichaelBenjamin
Principal Research Scientist, MIT

Triton Summer School
Based on MIT course 2.680 — Marine Autonomy, Sensing and Communications
Design, develop, and field-deploy the autonomy that runs on a marine robot. June 15–26, 2026.
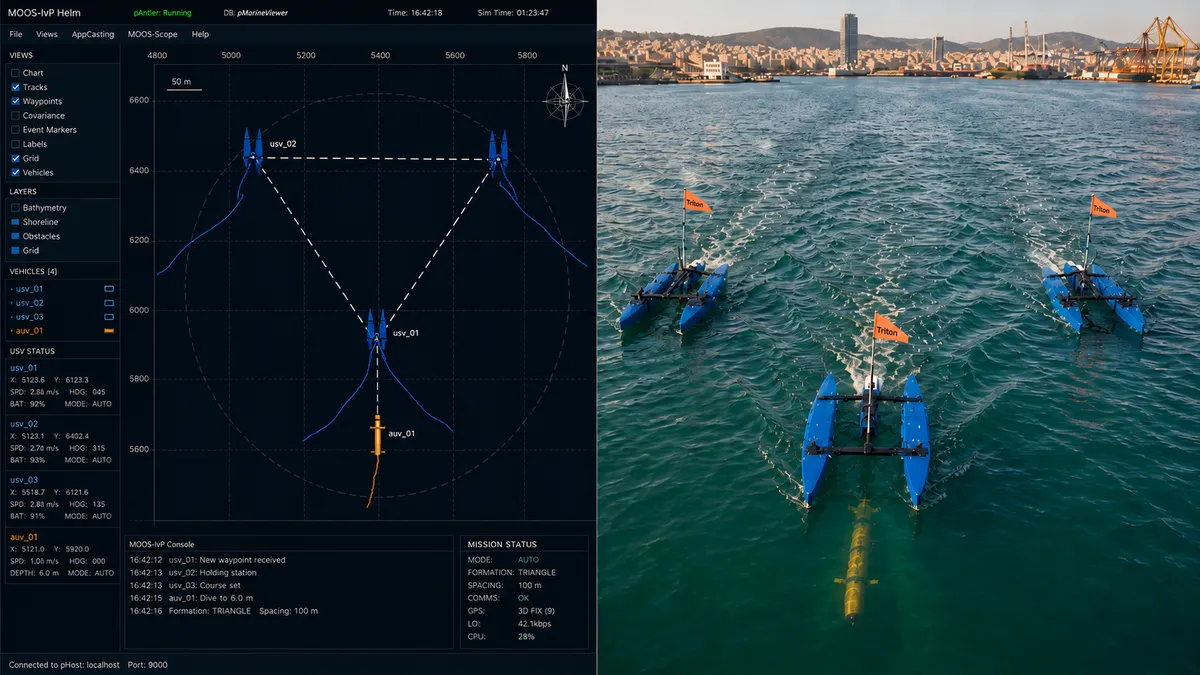
MOOS-IvP is the autonomy middleware behind MIT's marine robotics research and a growing number of defence and commercial USV and UUV programmes worldwide. Engineers who can configure, deploy, and extend it are rare — and demand is accelerating as autonomous maritime systems move from prototype to operational. MIT 2.680 is the fastest path to that proficiency: two weeks moving from simulation to competitive multi-vehicle field operations with real hardware. The skills transfer directly to UUV programmes, larger autonomous platforms, and any context where you need to specify or evaluate marine autonomy systems.
The procurement and research timelines for autonomous maritime systems have compressed. HCDI 2026 calls, EDF programmes, and NATO maritime autonomy requirements are all creating near-term demand for teams that can write technical specifications, run simulations, and operate autonomous marine vehicles in the field. MIT 2.680 covers all three. Two weeks is enough to develop genuine operational proficiency — simulation competence, field deployment experience, and MOOS-IvP fluency — rather than a certificate that documents attendance. The organisations that send engineers now will have documented, credentialled capability on record before most regional competitors have begun to address the gap.
Week 1 is simulation-intensive. Week 2 is hardware and water.
The programme is designed for engineers and scientists ready to move from conceptual understanding to hands-on operational competence. Typical participants include:
Aspirational, not a hard prerequisite for enrolment:
Capability, not credentials. The programme certificate documents that your engineer has programmed, deployed, and field-operated autonomous surface vehicles under MIT instruction. Mission logs, code, and MOOS-IvP proficiency come home with them. The MOOS-IvP skills and autonomy engineering experience are platform-transferable — applicable to UUV programmes and larger autonomous marine platforms.
Substantive material for proposals. Organizations submitting HCDI 2026 bids or EDF proposals can reference MIT-certified marine autonomy training by named engineers, with documented in-water mission results.
| Dates | June 15–26, 2026 |
| Location | Hellenic Naval Academy, Piraeus, Greece |
| Format | Full-time in-person intensive, Monday–Friday |
| Duration | 2 weeks (10 days of instruction and in-water sessions) |
| Language | English |
| Class size | 30 participants maximum |
| Lead instructor | Michael Benjamin (MIT Marine Autonomy Lab) |
| Certificate | MIT Open Learning certificate on completion |
| Organiser | StartSmart SEE, MIT authorised facilitator in Greece |
Principal Research Scientist, MIT
Supported by MIT teaching assistants from the Marine Autonomy Lab and MIT Lincoln Laboratory.
We use cookies to measure site traffic via Google Analytics. Read our Cookie Policy and Privacy Notice.