

MichaelTriantafyllou
Doherty Professor; Director, MIT Sea Grant

Triton Summer School
Based on MIT course 2.017 — An Introduction to Marine Robotics
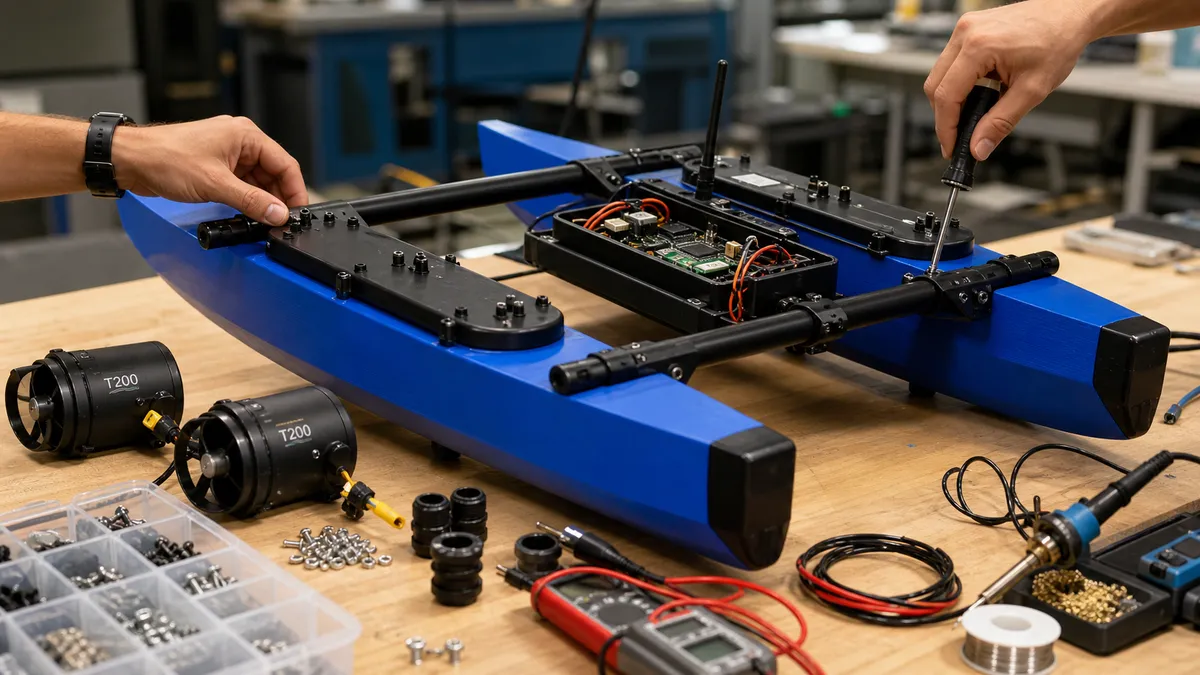
Design, build, program, test, and race a team-built autonomous surface vessel. June 1–12, 2026.
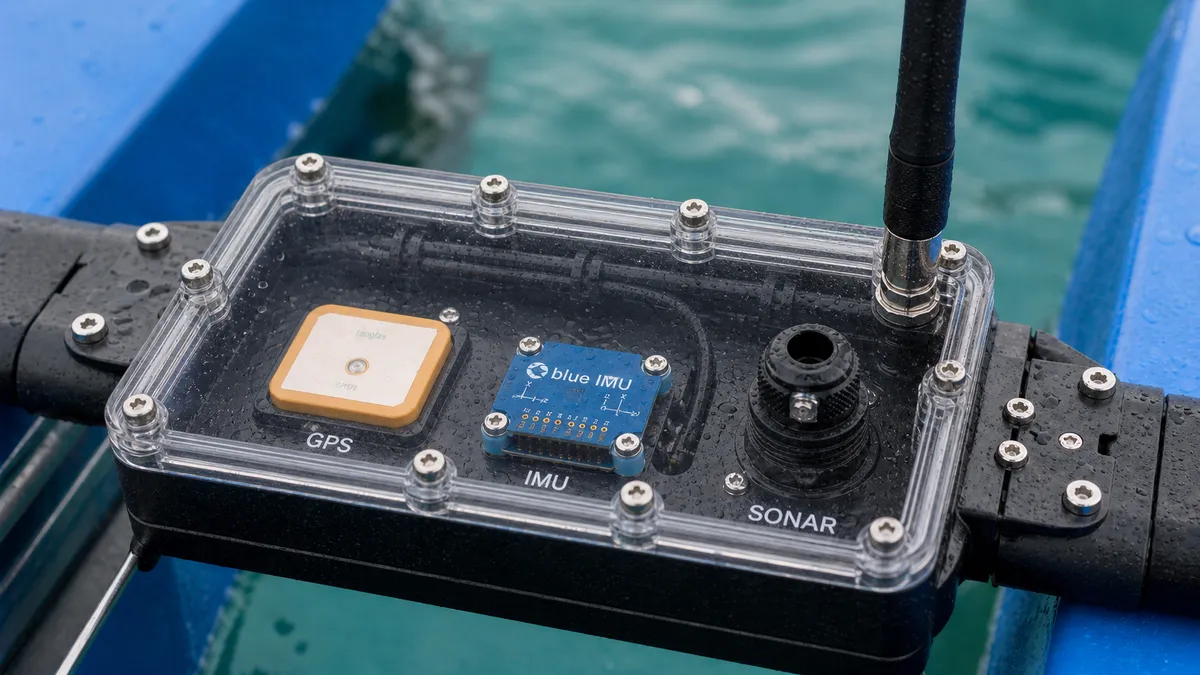
Autonomous surface and underwater vehicles have moved from research programmes to active procurement. Defence organisations, offshore energy companies, and maritime survey operators are all hiring engineers who can build and integrate these systems — but structured training at the hardware level is almost nonexistent outside a handful of universities. MIT 2.017 is the course that closes that gap. In two weeks, you go from fundamentals to a team-built, on-water autonomous vehicle. The sensors, actuators, control architecture, and systems-integration discipline you develop are directly applicable to USV and UUV platforms at any scale.
Autonomous surface vehicle engineering sits at the intersection of systems integration, embedded electronics, control theory, and marine operations. No single prior background covers all of it. MIT 2.017 compresses the complete engineering stack — from concept to race-day competition — into two weeks of focused instruction and hands-on build time. For engineers entering marine autonomy for the first time, it is the most direct path to fluency with the physical layer. The hardware skills — sensors, control systems, actuators, and system integration — apply equally to underwater and larger autonomous platforms.
Lecture-then-lab every day. Week 2 is all build and water.
The programme is designed for engineers and scientists ready to move from conceptual understanding to hands-on operational competence. Typical participants include:
Capability, not credentials. The programme certificate documents that your engineer has designed, built, and field-tested an autonomous surface vehicle under MIT instruction — not that they attended a lecture series. Lab notebooks, code, and hardware configurations come home too.
Substantive material for proposals. Organizations submitting HCDI 2026 bids or EDF proposals can reference MIT-certified marine autonomy training by named engineers, with documented on-water mission results.
| Dates | June 1–12, 2026 |
| Location | Hellenic Naval Academy, Piraeus, Greece |
| Format | Full-time in-person intensive, Monday–Friday |
| Duration | 2 weeks (10 days of instruction) |
| Language | English |
| Class size | 30 participants maximum |
| Lead instructor | Michael Triantafyllou (MIT Sea Grant and MIT MechE) |
| Instructors | David Barrett and Andrew Bennett (MIT Sea Grant) |
| Certificate | MIT Open Learning certificate on completion |
| Organiser | StartSmart SEE, MIT authorised facilitator in Greece |
Doherty Professor; Director, MIT Sea Grant

Professor of the Practice, MIT Mechanical Engineering

Senior Lecturer, MIT MechE; MIT Sea Grant
Supported by MIT teaching assistants from the Department of Mechanical Engineering.
We use cookies to measure site traffic via Google Analytics. Read our Cookie Policy and Privacy Notice.